









































![CCTV-17农业农村 | [中国三农报道]中国科学院植被病虫害遥感监测与预测系统升级版发布](/uploads/202208/630c32e37f65b.png)

































近两年,得益于自动驾驶对激光雷达传感器量产和低价的巨大需求,激光雷达扫描头的价格从十万元级降至千元级,打破了激光雷达专业门槛高,应用成本高的局面,国内外各硬件制造商纷纷借机推出轻小型低成本激光雷达扫描仪。本文意在探索轻扫式激光雷达扫描仪在快速获取林木三维空间结构及林下地形的详细信息,进而准确的提取单木参数中的实际应用。
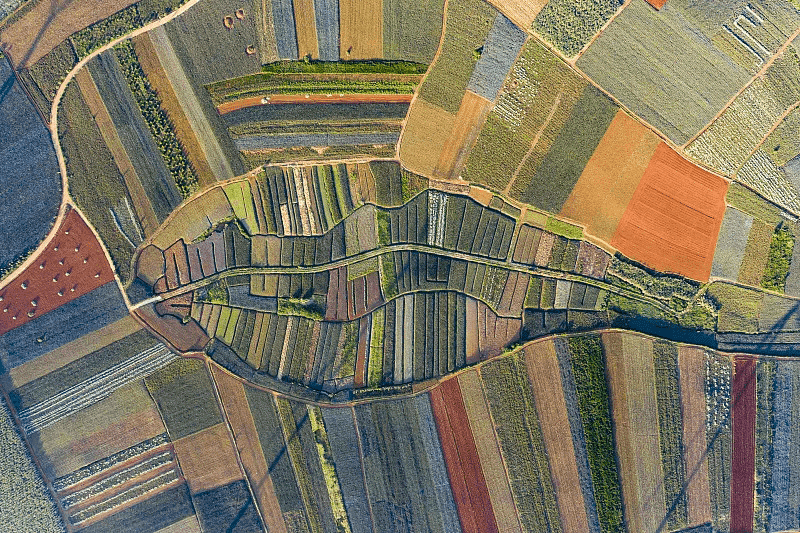
我们选取了北京市远郊区县山区造林地进行了实际测试,采用人工测量、泰来兴业公司法如架站式地基激光雷达系统、四维远见公司轻扫式激光雷达系统三种手段采集林木信息,并采用国产自主的“银河点点通”激光雷达数据处理软件对单木进行识别,获取树木位置、株数、树高和胸径等信息。
本篇文章针对架站式地基激光雷达获取和处理流程进行探索。
设备情况

作业流程

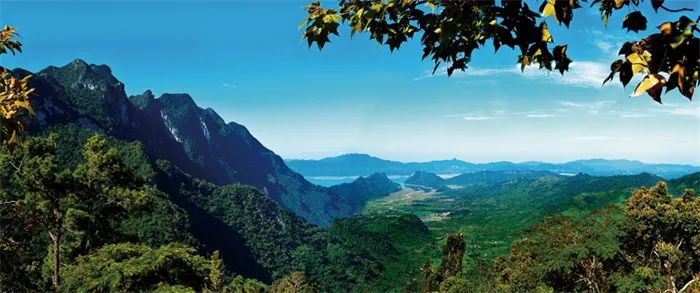
作业确定区域

样方实测数据获取

激光点云数据获取


内业处理
处理流程

样地一:
原始点数总量:88864990,平均点密度:18811.4点/平方米,
树种:侧柏

原始点云
由于地基激光雷达扫描时存在大量的重复点,大量的点云冗余,增加了数据量,处理时间较长。因此对原始点云进行抽稀。

依据3D体素,格网尺寸0.01m抽稀后点云数量:23543618;点密度4983.83点/平方米。

点云剖面
一键式地基点云树干提取:



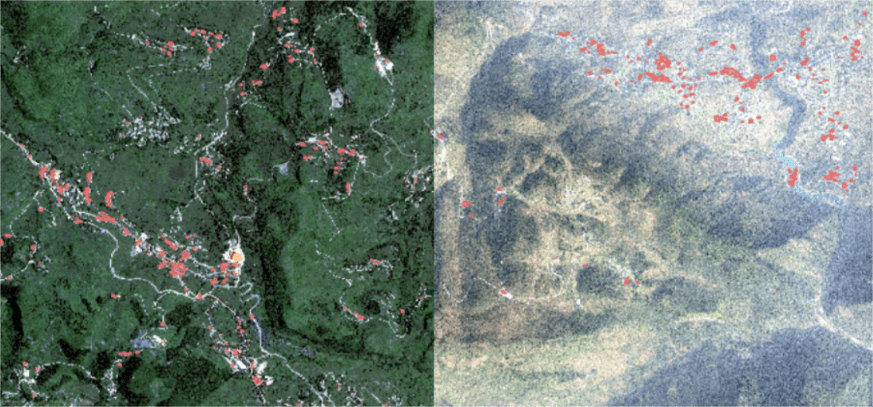
提取的单株树干与胸径叠加

和外业采集点实际对比的情况

样地一自动提取林木参数与外业实际采集林木参数对比
样地二:
树种:杨树
原始点数量:59562487,点密度:5674.78
按照0.01m抽稀后点数:22456013 点密度:2139.48

原始点云

点云剖面


提取单株树干与胸径的效果

和外业采集点实际对比的情况

样地二自动提取林木参数与外业实际采集林木参数对比
综合对比分析得到:
自动化程度:
人工测量自动化程度最低,还需要大量纸质信息的电子化录入,并得不到林木立体信息;
架站式激光雷达系统采用激光雷达后处理软件银河点点通,自动化程度极高,直接对点云数据进行操作,无需栅格化处理,生成归一化数字表面模型,最终对点云树干分割和树干参数信息全部实现自动化的处理,得到了树木胸径及树干形态。
简单易用。面向单木分割和参数提取的激光雷达点云数据处理和分析的过程中,尽管涉及的9个步骤需要少量的参数输入,但这些参数的取值均有明确的物理含义、而且这些参数与点云的密度、精度、场景的林木基本情况等先验知识有关,易于操作人员使用。
精度对比:
胸径不考虑人为测量误差等因素,默认人工测量的数据精度值最可靠。对比得到,架站式扫描仪与人工实测相比,样地一(侧柏)平均误差为0.175cm,中误差为1.028cm;样地二(杨树)平均误差为-0.109cm,中误差为0.627cm;
位置信息,由于人工无法采集树木中心的位置,而软件提取的为树木中心位置的坐标。忽略这个的影响,基本可以达到精度要求。
综上,使用地基激光雷达扫描仪结合银河点点通软件,可获取林区单木的准确胸径和树高信息,可以二元材积方程更精确的预估林木蓄积量。背包激光雷达和机载激光雷达数据,由于其数据获取效率更高,结合点点通软件对单木胸径、树高的拟合和反演,在实际大规模项目执行时,更具意义。欢迎业界同仁以更多实际项目试用和予以验证。
树干分割效果展示
